我们知道,开关霍尔传感器因为它自身的一些特点往往应用在对精度要求不高、工况相对单一、低成本的一些小控制器上。
而对于车用的大电机来说,我们最常用的还是旋转变压器(旋变)这一类位置传感器。那么,下面就给大家详细的介绍一下旋变的相关内容:
旋转变压器(旋变),是电机控制中常用的一种位置传感器,用来反应电机的转子位置,提供给软件做电机控制等相关算法。
如上图所示,旋变也能够理解为是一个小电机,也分定子与转子,通常旋变的转子安装在电机的转轴上,与电机同步旋转,并在定子线圈中感应出位置信息,由定子线圈传递出来,得到最终的位置。
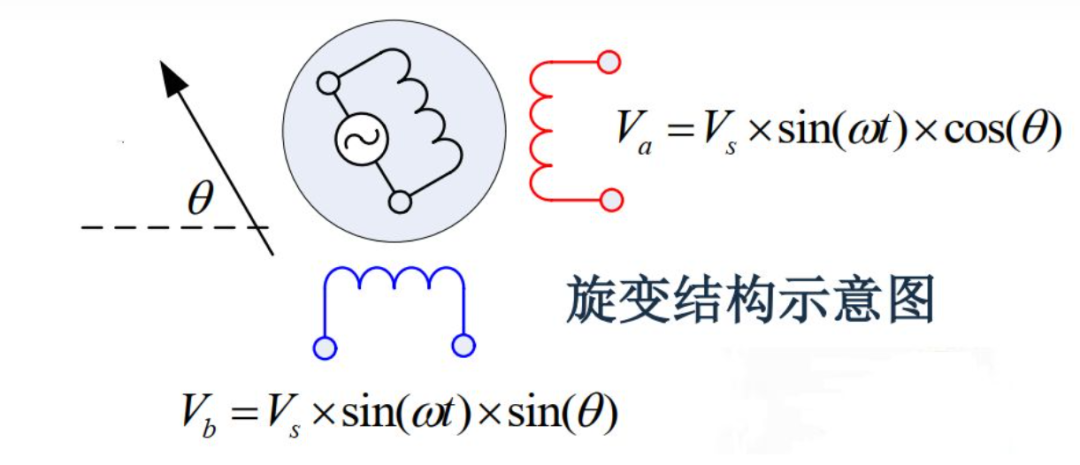
旋变的结构示意图如上图所示,中间的R1R2线分别为互相垂直的定子线中通入的是高频正弦信号,我们一般称该信号为激励信号;此时会在次级线圈中感应出高频的感应信号,这个信号就包含了具有位置信息的包络信号;我们将返回的感应信号提取包络,就能获取对应的正余弦信息;通过硬解码/软解码等方式解码后,能够获得定子的绝对位置信息(这里注意强调一下是绝对位置)。下面我们来推导一下这个过程:
如上图中的位置所示,旋变的激励线圈与水平的夹角为θ,那么结合激励线圈中的信号,可以分别得到两个感应线圈中的信号分别为:
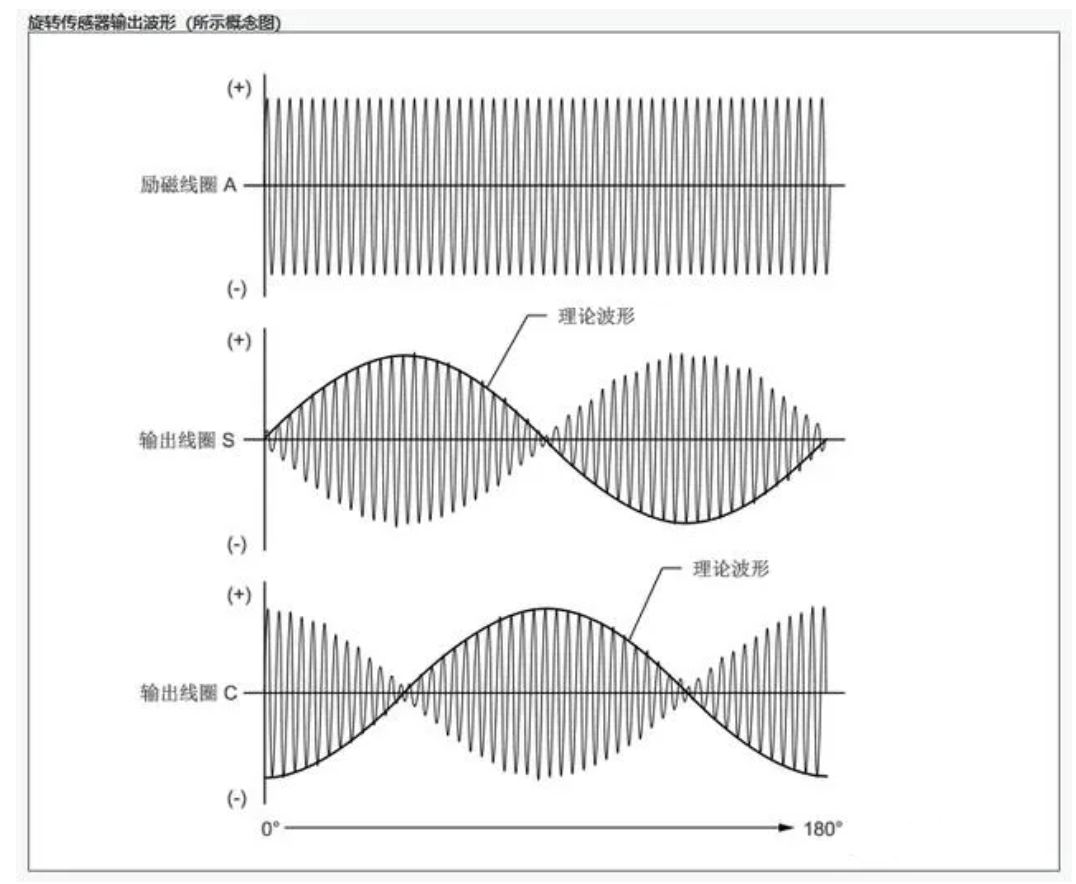
其中正余弦的波形是幅值一直在变化的正弦曲线,结合上面的方程不难理解,正弦曲线其实是激励源产生的,而之所以幅值会一直在变化是因为旋转过程中,激励线圈与次级线圈的夹角θ一直在变化,所以产生了这种波形。而这个波形的外包络(即图中的黑线部分)就是我们所需要的正余弦信号。
所以,我们在解码过程中,只需要能够提取正余弦信号的外包络,就能获取转子的绝对位置信息了。
那么,基于以上分析,了解了旋变的主要结构和工作原理以后,旋变的应用很重要的两个功能就是激励信号的产生和回采正余弦信号的外包络提取及角度计算(这一部分通常称为旋变解码)。
通过前面的介绍,我们大家都知道旋变的工作需要一个高频的正弦信号输入,我们一般称为激励信号。而在实际的应用过程中,正弦曲线是无法通过MCU某个模块直接得到的。所以,我们很自然的能想到PWM调制技术,与电机控制一样,都是通过高频PWM的脉宽调制,最终达到近似输出正余弦电压的效果。
另一方面,除了MCU输出的高频PWM信号外,控制器硬件上也需要相关电路的匹配设计,硬件需要完成的功能有调整比例、调整偏置、增加驱动能力等,软硬件结合后才能够最终得到我们所需要的激励信号波形。关于旋变的硬件电路这部分,网上有很多可用的资源作为参考,这里不过多的介绍。
为了更直观的说明激励信号的产生,我用Simulink+Pspice联合仿真的方式,粗略的进行了仿真。
其中Simulink中以300kHz以上的频率产生PWM波形(脉宽变化),PSpice中搭了一套网上可用的激励电路,最后观察电路中的输出(即实际应用过程中输入给旋变的激励)是如何变化的。
仿真得到的激励波形在峰值点有点削波的情况,这是由于在PWM生成的地方有两个relay模块,在PWM小脉宽的时候,可能不满足relay中buffer的设定,所以在峰值点的时候波形存在缺失。
旋变的标定在日常工作中有很多通俗的说法,比如说零位角标定、电机角标等等。虽然说法不同,但是内容及功能是一致的,就是要知道旋变的零位与电机的零位之间的角度偏差。
原因很简单,前面也强调过了,旋变是一种绝对位置传感器,获取的是电机转子位置的绝对位置。但是我们电机控制的本质是定子磁场与转子磁场的相互作用,而定子磁场是通过输出电流得到的,所以我们应该的并不是转子的绝对位置,而是转子与定子之间的相对位置,有了相对位置,定子磁场才可以准确的输出。
旋变标定的意义,上面已经解释过了,方法也很简单,旋变的标定需要寻找的是旋变的零位和电机零位的偏差,又由于旋变能获取的是绝对位置,所以,实际应用过程中我们只要找到电机零位对应的旋变位置,实际上的意思就是旋变零位与电机零位的偏差了。
找电机零位的方法就很多了,比如Id、 UαUβ等等,方式有很多,各有优劣,不做过多介绍了。
最后,补充一句,开篇就说过了,旋变其实也能够理解为一个小电机,因为旋变也有极对数的概念,为了方便我们一般会与大电机极对数相同的旋变来作为传感器,这样旋变解码出来的角度就是电机的电角度。如果二者之间的极对数不相等,那还存在换算的关系。
关键字:编辑:什么鱼 引用地址:旋转变压器位置传感器旋变的主要结构和工作原理
奥地利微电子公司(SIX股票代码:AMS)是全球领先的高性能模拟IC设计者及制造商,专为消费、工业、汽车应用行业服务,该公司今日宣布推出新的磁性旋转位置传感器芯片家族,新品具有先进的安全性能,适合于具有ISO26262安全规定要求的汽车应用。 来自奥地利微电子的所有磁旋转位置传感器都是高度集成的片上系统,包含霍尔磁性感应元素、一个模拟前端和数字信号处理,以便实现准确、精密的角度测量。新的60系列传感器芯片——AS5161,AS5261(含数字PWM输出)和AS5162,AS5262(含模拟电压输出),具有最佳的汽车级保护功能,可使汽车制造商的应用达到ISO26262标准严格的安全要求。 ISO262
产品特性: 带SPC接口的霍尔效应3D位置传感器允许主动杂散场补偿 360度, 抗杂散场角度测量,使该传感器适合转向角度位置检测 TDK公司 宣布Micronas masterHAL®传感器系列的产品组合扩展,发布了新的抗杂散场3D HAL®位置传感器HAL 3970。该传感器适用于汽车和工业应用,具有从0°到360°的高精度角度检测,线性位置检测,并使用SPC输出来传输计算的位置信息。SPC接口是SENT协议根据SAE J2716标准的增强。它可以依据外部ECU发送的触发脉冲来传输数据,并且支持点对点连接以及最多四个传感器的单线总线模式。 单元时间、帧格式、触发模式、慢通道格式、滚动计数器等参数易于配置。 例如,HAL
在介绍传统无位置传感器反电动势检测的新方法的基础上,采用了恒零相移滤波技术,提出了一种新型的检测的新方法,并对这种新型的检测的新方法进行了实验验证,最终证实了控制策略的正确性与合理性。 引言 永磁无刷直流电机由于其无换向火花、运行可靠、维护方便、结构相对比较简单、无励磁损耗等众多优点,自20世纪50年代出现以来,就在很多场合得到愈来愈普遍的应用。传统的永磁无刷直流电机均需一个附加的位置传感器,用以向逆变桥提供必要的换向信号。它的存在给直流无刷电机的应用带来很多不便:首先,位置传感器会增加电机的体积和成本;其次,连线众多的位置传感器会降低电机运行的可靠性,即便是现在应用最为广泛的霍尔传感器,也存在某些特定的程度的磁不敏感区;再次,在某些恶劣的工作环境中,如在
1实机测试 实验系统的结构如图5所示。扭矩仪的 测量 范围是10kg-cm。在这个控制管理系统里的电动势估计神经网络模型有7个输入层,14个中间层,和两个输出层。神经网络被离线训练后来处参考速度和的负载的波动。特别地,在扭矩为0.001,0.5,1.0 N-m,当参考速度从400→800→1200rpm,通过一个位置 传感器 驱动 电机 来获得训练数据。电动势估计神经网络模型经过这样的训练后被应用到实机测试中,在该实机中,参考速度固定但负载变化。图6表明了在参考速度为1000rpm,负载扭矩从0增加到10kg-cm所得到的实验结果。从表上可以明显看出,即使是在负载变化时, 电机 速度仍与给定参考速度一致。在无负载运行和转矩为10kg
无刷直流电机驱动设计 /
0 引言 在一些应用场合要求使用的电机体积小、效率高、转速高,微型永磁无刷直流电机能够较好地满足规定的要求。因为电机体积较小,安装的地方传感器困难,所以微型无刷直流电机的无位置传感器控制就显得很必要。 无刷直流电机的无位置传感器控制的难点在于转子位置信号的检测,目前国内外研究人员提出了诸多方法,其中反电动势法最为简单、可靠,应用场景范围最广泛。普遍采用的控制方案为基于DSP的控制和基于专用集成电路的控制等,但是其价格高、体积大,不利于用在微型电机控制器中。本文介绍基于C8051F330单片机、检测反电动势法的无位置传感器无刷直流电机的控制器,系统结构相对比较简单,体积超小型,价格低,运行性能良好。 1 无传感器无刷
在某些类别的电机驱动应用中,用户对不可预测、不均匀或不规则的电机行为基本上没有容忍度或就没有容忍度。虽然这当然不能适用于所有电机驱动的产品——例如电动牙刷或电池供电的玩具,但它们始终重视材料清单 (BoM) 成本,并且几乎总是会接受少量不稳定的电机行为作为最小化电机成本的合理权衡——其他电机驱动应用需要更高水平的操作。 电动工具是一种产品类型的例子,其中可靠和可预测的电机性能是绝对必要的特征。考虑一下电动锯用户在启动时向后跳或产生向前“打嗝”运动的潜在伤害和/或不安 - 特别是如果他们刚刚在切割中间停止了工具。同样,市场将很快拒绝在每次使用期间以不同扭矩和/或加速度启动的电钻或类似电动工具。 这种对性能至关重要的电机系
选择 /
瑞萨电子发布全新Resolver 4.0目录,提供80款市场成熟的电感式
瑞萨电子发布全新Resolver 4.0目录,提供80款市场成熟的电感式位置传感器设计 利用全面的参考解决方案,用户都能够低成本启动其位置感测系统开发 2022 年 9 月 15 日,中国北京讯 - 全球半导体解决方案供应商瑞萨电子今日宣布, 推出面向汽车和工业电机领域创新电感式位置传感器的全新Resolver 4.0参考设计目录 。借助该目录,工程师们现可拥有80款基于IPS2电机换向传感器的即时设计资源,每款参考设计都针对独特的电机轴或极对配置。这些参考方案配有完整的设计文件、测试报告、工具和指南,帮助工程人员缩短设计学习时间,加速设计到生产的流程。 Resolver 4.0目录提供可在汽车系统、机器人、伺服电机、家
设计 /
引言 航迹绘算仪(以下简称航迹仪)是很重要的航海导航设备,用于自动推算船舶的船位并将其航迹自动绘制在麦卡托海图上。当航迹仪发生故障进厂维修时,需构建航迹仪仿真运行与测试平台,完成航迹仪在线工作环境的模拟和解算输出的检测,以方便修东西的人对故障进行排除和检测维修后的航迹仪经纬度输出精度是不是满足要求等。对于大量采用 旋转变压器 (以下简称“旋变”)、自整角机等微电机作为机械解算元件的航迹仪来说,轴角信号的采集是其仿真运行与测试平台需重点解决的问题之一。本文以一路纬度信号( 旋转变压器 输出,转值2°/r,激磁40V400Hz,信号电压23V,增量式输出)的采集为例介绍一种旋变轴角模拟信号的采集方法。 设
Digi-Key 与 DFRobot: Boson Kit 环境传感器 + 星际工厂
MPS 隔离式稳压 DC/DC 模块——MIE系列首发,邀你一探究竟!
有奖直播 与英飞凌一同革新您的电动汽车温控系统:集成热管理系统(低压侧)
ADI世健工业嘉年华——世健·ADI工业趴:票选心仪带盐人 活动开始啦
贸泽电子开售可提升AI和显卡性能的Advantech VEGA-X110嵌入式GPU卡
2023年11月17日 – 提供超丰富半导体和电子元器件™的业界知名新品引入 (NPI) 代理商贸泽电子 (Mouser Electronics) 即日起供货Adva ...
当然,在此之前,英特尔的FPGA依然还要接受当今行业的挑战,诸如人工智能、安全等课题。11月14日,2023英特尔FPGA中国技术日上,英特尔详细解析了当前现状与未来FPGA的规划。...
MIKROE推出新开源软硬件解决方案使数百个Click板能够热插拔到Linux开发环境中
2023年11月16日: MikroElektronika(MIKROE) ,作为一家通过提供基于成熟标准的创新式硬软件产品来大幅度缩短开发时间的嵌入式解决方案公司 ...
电动机星形一三角形起动自动控制线路工作原理:合上电源开关QK,按下起动按钮SB1,接触器KM2、KM1同时吸合,主触头闭合,KM2常闭触头断开,KM ...
单相电动机控制电路单相电阻启动电动机可逆运转控制电路单相电动机主绕组电抗器调速控制电路单相电容运转电动机控制电路单相电容启动、电容 ...

CPS19-LA00A10-SNCCWTWF-AI0YRVAR-W1054-S
全新骁龙7系移动平台带来出色的性能和能效,以及多个7系层级首次支持的特性
贸泽电子开售可提升AI和显卡性能的Advantech VEGA-X110嵌入式GPU卡
MIKROE推出新开源软硬件解决方案使数百个Click板能够热插拔到Linux开发环境中
Keysight示波器主题月有奖系列活动之 注册大奖天天抽 抢楼踩中亦有奖
TE 《新趋势报告: 如何有效应对当下测试测量领域的挑战》下载最新趋势报告
泰克移动多媒体总线系列专题来袭~《HDMI2.0规范测试方案》下载有礼!
站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科